![]()
Examples of Screens of the SimuPLC 3.1.0
| Home Page | SimuPLC | SimuPLC Help | Comments | Em Português |
|
Examples of Screens of the SimuPLC 3.1.0
|
|
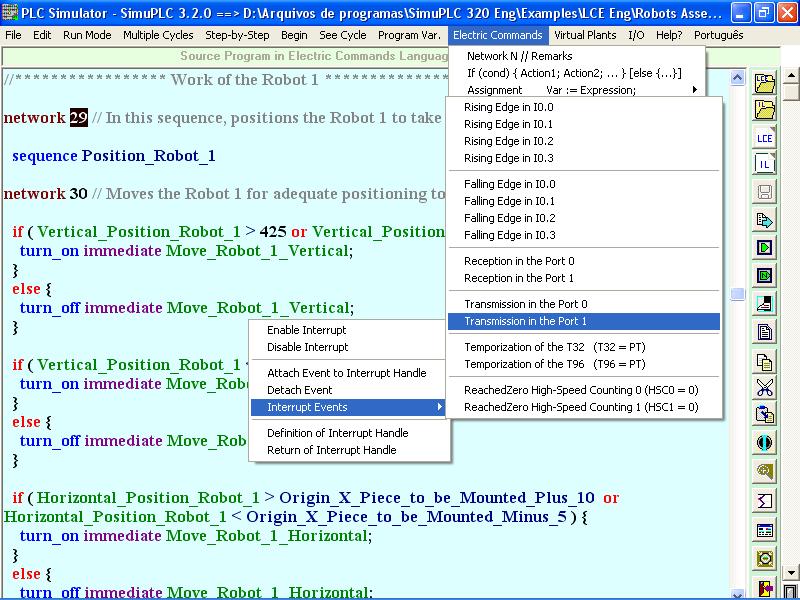
After typewriting or load (opening) of the source program in LCE, and operation of some menus:
After the compilation, we have the ladder diagram and the translated code into instruction list IL, ready to simulation of functioning of the implemented control program (what is occurring below):
To build more realistic simulations, we can interconnect the SimuPLC to simulated sensors and actuators contained on the virtual plants (in the current version of the SimuPLC, the 3.3.0, only three plants were implemented: three simulated tanks, a simulated elevator, two simulated cooperative robots, and a simulated stepping motor-based mini-mat; however in future versions I plan to make available other ones):
|
Copyright © 2002
André Luiz Barbosa
All rights reserved. |